Lecture
The purpose of teaching the discipline is to give students a fairly complete picture of the basic concepts and principles of obtaining, transforming and analyzing various types of mathematical models used in the theory of automatic control to describe control objects of various nature and control systems of various classes. In addition, students should master the skills of solving practical problems related to mathematical modeling in the theory of automatic control, rationally using the mathematical apparatus.
A wide range of methods for analyzing and synthesizing automatic control systems, various forms of representing mathematical models of objects of different nature used by specialists and bachelors requires the following tasks within the framework of the Mathematical Foundations of Automatic Control Theory (MOTAU) discipline:
the deepening of knowledge and the formalization of representations in the field of the foundations of the mathematical description of automatic control systems, such sections of higher mathematics as fractional rational functions of a complex variable, impulse functions, Fourier and Laplace transforms, an operator method for solving differential equations, linear algebra;
the formation of knowledge and practical skills of obtaining and transforming various forms of mathematical models of dynamic units and automatic control systems in order to use them rationally in solving problems of analysis and synthesis of control systems;
studying the specifics of the methods of obtaining and transforming mathematical models of multidimensional control objects based on the apparatus of linear algebra and the representation of objects in the state space;
the study of methods for assessing the quality of processes in automatic control systems, the formation of practical skills in the use of various quality criteria for transients in the analysis and synthesis of automatic control systems;
the formation of concepts and practical skills in solving problems of the identification of elements of ACS.
The study of the discipline is based on the fact that the student has relevant mathematical training in the field of differential and integral calculi, linear algebra, complex numbers and trigonometric functions, as well as is familiar with the basic concepts and laws discussed in the courses of theoretical fundamentals of electrical engineering and theoretical mechanics. Education in the 4th semester takes place in parallel with the study of TOE (part 2), in the 5th semester - with the study of TAU (part 1).
The discipline is designed to study during the 4th and 5th semesters (2nd and 3rd year), includes 42 lecture hours, 28 hours of practical training and 14 hours of laboratory practical work (in the 5th semester).
The discipline includes the following main sections:
basics of mathematical description of automatic control systems,
types of mathematical models of dynamic links,
mathematical models of elementary dynamic links,
mathematical models of ACS,
features of mathematical models of multidimensional automatic control systems,
methods for assessing the quality of automatic control systems,
identification of the parameters of the mathematical model of automatic control systems.
Fractional Rational Functions
Fractional rational functions of a complex variable in various forms are widely used in TAU for representing transfer functions and solving problems of synthesis and analysis of ACS.
Fractional rational function of some real or complex variable  has the following form:
has the following form:
| (one) |
Where  - polynomials of the numerator and denominator,
- polynomials of the numerator and denominator,  - real numbers
- real numbers  - the order of the numerator,
- the order of the numerator,  - the order of the denominator (the entire fractional rational function of the function),
- the order of the denominator (the entire fractional rational function of the function),  - for functions used in TAU.
- for functions used in TAU.
Polynomials of a fractionally rational function can be represented as a product of binomials (decomposition of a polynomial into factors), then the function can be represented in the form of a Bode
| (2) |
Where  - roots of the equation
- roots of the equation  ,
,  - the roots of the characteristic equation
- the roots of the characteristic equation  .
.
Roots of the equation  called zero fractional rational functions
called zero fractional rational functions  , because
, because
 .
.
Roots of the characteristic equation  called poles of a fractional rational function, since
called poles of a fractional rational function, since
 .
.
The poles and zeros can be real and complex conjugate numbers. Thus, the task of representing a function in the form of a Bode reduces to finding the roots of equations formed by the polynomials of the numerator and the denominator.
They are usually located on the plane of the complex variable.  , marking the location of the poles with crosses, and zeros as circles. For a better mastery of this material, it is necessary to refresh in mind the information from higher mathematics on operations with complex numbers. Zeros, and especially the poles of fractional rational functions, are depicted on the plane of the complex variable
, marking the location of the poles with crosses, and zeros as circles. For a better mastery of this material, it is necessary to refresh in mind the information from higher mathematics on operations with complex numbers. Zeros, and especially the poles of fractional rational functions, are depicted on the plane of the complex variable  . In fig. 1 shows the location of the poles and zeros of some fractional rational function.
. In fig. 1 shows the location of the poles and zeros of some fractional rational function.
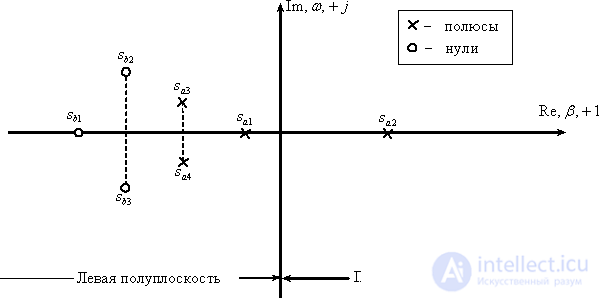
Fig. one
Imaginary axis divides the plane  on the right and left half-planes. Zeros and poles located in the right half-plane are called right, in the left half-plane - left. Complex poles and zeros are always arranged in pairs symmetrically with respect to the real axis; such pairs of roots are called complex conjugate roots. If among the zeros and poles there are two or more of the same, they are called multiples, unlike the others, which are called simple. The multiplicity is determined by the number of identical zeros or poles (
on the right and left half-planes. Zeros and poles located in the right half-plane are called right, in the left half-plane - left. Complex poles and zeros are always arranged in pairs symmetrically with respect to the real axis; such pairs of roots are called complex conjugate roots. If among the zeros and poles there are two or more of the same, they are called multiples, unlike the others, which are called simple. The multiplicity is determined by the number of identical zeros or poles (  - 2). Consider an example of getting a Bode form.
- 2). Consider an example of getting a Bode form.
Example
Introduce the fractional rational function
in the form of a Bode and show the location of the poles and zeros of the fractionally rational function on the complex plane.
Decision
Find the roots of the equation
 .
.
We get two complex conjugate roots (zero)
 ,
,  .
.
Find the poles 
 .
.
We get three poles
 .
.
We show the location of the zeros and poles on the complex plane (see Fig. 2).
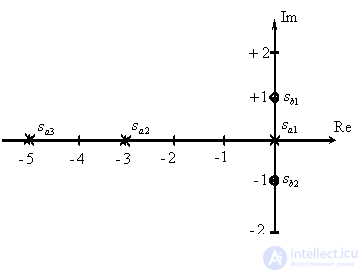
Fig. 2
The fractional rational function (1) is often represented as the sum of the simplest fractions (Heavisite form)
| (3) |
Where  - the roots of the characteristic equation
- the roots of the characteristic equation  ,
,  - decomposition coefficients, which are found by the following function:
- decomposition coefficients, which are found by the following function:
| (four) |
Such a representation of a fractional rational function is possible if the poles  - simple as well
- simple as well  .
.
A function that has one zero pole can be represented as follows:
In this case, instead of formulas (3), (4) apply the expression
| (five) |
Where  - nonzero poles
- nonzero poles  the roots of the equation
the roots of the equation  ,
,
| (6) |
Consequently, the representation of a fractional rational function in the form of Heavisite is reduced to finding the poles of a fractional rational function and the rational use of decomposition formulas. Consider a number of examples of obtaining the Bode form
Example
Introduce the fractional rational function
in the form of Hevisite, using the decomposition formulas (3), (4).
Decision
The numerator polynomial equation has the form
 .
.
The characteristic equation is
 .
.
Find the roots of the characteristic equation
 ,
,  .
.
Define the derivative of the denominator polynomial
 .
.
Determine the coefficients of the decomposition corresponding to the number of poles
 ,
,  .
.
Then the Heavisite form is
 .
.
Example
Introduce the fractional rational function
in the form of Hevisite, using the decomposition formulas (5), (6).
Decision
Imagine  as
as

Then
 ,
,
 .
.
Non-zero poles have the form
 ,
,  .
.
Derivative of 
 .
.
Determine the coefficients of decomposition
 ,
,  ,
,  .
.
Then the Heavisite form is
 .
.
Impulse functions
Real signals (variables and influences) encountered in control systems are usually represented with the help of some idealizations — impulse functions. The most commonly used is the step unit function (Heavisite function) and the delta function (Dirac function), which are described as follows:

Graphs of these functions are shown in Fig. 3
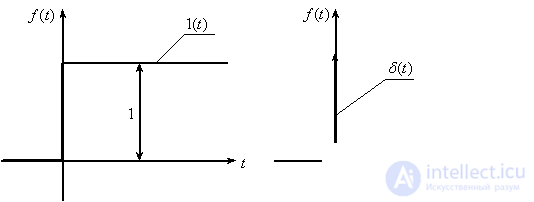
Fig. 3
For single and delta functions true
 .
.
Thus, the delta function is an instantaneous pulse equal to infinity at zero time and zero at other times, the area of which is constant and equal to one. Therefore sometimes  called a single impulse.
called a single impulse.
Test questions and tasks
How to determine the order of fractional rational functions?
Explain the procedure for converting a function to a Bode form.
What poles of the fractional rational function are called simple?
What is the idealization of the representation of a real signal by a single step function?
Introduce the fractional rational function
in the form of a bode.
Answer :
 .
.
Introduce the fractional rational function

in the form of Hevisite.
Answer :
 .
.
Introduce the fractional rational function
in the form of Hevisite.
Answer :
 .
.





Comments
To leave a comment
Mathematical foundations of the theory of automatic control
Terms: Mathematical foundations of the theory of automatic control