Lecture
The robotics of underwater devices develops in many directions. Most of the underwater robots are created for rescue operations and research. In the future, underwater robots will help develop the ocean to organize fishing, pharmaceuticals, and the search for minerals and energy sources.
Underwater robots can also be used as testing models for robots intended for space research. Zero-buoyancy robots are weightless in a sense. In such robots, rocket engines are modeled with propellers. Underwater tests can simulate the absence of friction, observed in outer space. If you want to create a robot working in space, good preliminary results can be obtained using the model of an underwater robot. The NASA organization began the development of technologies for remotely operated devices using teletracking systems (TROV) (see Fig. 13.1) and autonomous underwater devices (AUV). In TROV devices, virtual reality systems are used as remote control systems. Tele-tracking technologies play an even more important role in studies of the surrounding space and environment harmful to humans. In the future, tele-tracking technologies will develop in these areas as well as develop new ones, such as the entertainment industry.

Fig. 13.1 TROV NASA Apparatus. Photo by NASA.
Dolphins and tuna
Interesting research was undertaken on the principles of swimming and swimming movements of fish. It is well known that underwater inhabitants can move and sail more efficiently and economically than a propeller can move a ship. Want to easily prove it to yourself? Have you ever tapped on the glass of an aquarium in which fish swim? Sudden noise causes the fish to rush around the aquarium so quickly that your eyes are not able to keep track of their movements. Imagine that you can create a ship that can move with similar speed and suddenness. It is therefore not surprising that the US government funds some of these studies.
How much more efficient is the fish swimming compared to our modern methods of navigation? Let's do a brief analysis. In 1936, the British zoologist James Gray investigated dolphins. His goal was to calculate the power developed by a dolphin in order to move at a speed of 20 knots - the speed that is commonly observed in dolphins. Gray's model was very tough on the assumption that water resistance for a moving dolphin remains the same for rigid and flexible models. This turned out to be wrong, but even with the necessary amendment, Gray’s results were very curious. It turned out that his dolphin was 7 times weaker than necessary to achieve a speed of 20 knots. Using deduction, it can be assumed that the dolphin is somehow able to reduce water resistance by a factor of 7. But to date there is no exact answer.
Over the past 60 years, no one has been able to definitively confirm or deny Gray's calculations. Any floating mechanism that mimics the movement of fish is much less effective. Recently, new research has been undertaken to study the way fish swim. With the use of new computer technology, scientists hope to get an answer to this long-standing question.
In the past few years, scientists at MIT have explored bluefin tuna. They created a model of a 120 cm long robot fish that floats in a special pool to test the ride quality of ships. A robot fish is like a real fish. The skin of the fish is made of special foam and covered with lycra. The robot used six external engines connected with pulleys and “tendons” inside the robot. The movement of the fish resembles the swimming of real bluefin tuna.
Swimming with a wing
The tail of the fish can be considered as a hydrofoil. When moving the tail from side to side, it throws back the flow of water and accordingly moves the fish forward. During the movement of the tail in the water vortices are formed behind it. There is reason to believe that the principle of the formation of these vortices may be the key to understanding the effectiveness of the movement of fish.
Dolphins are interesting because their tail - scuba wing is located horizontally. It does not move from side to side like that of a fish, but makes up and down movements. Such movements effectively push the dolphin's body forward as well.
Penguins swim with the help of their wings. The sight of a penguin swimming in water is a lot like a bird flight. However, there is a difference. When flying, the bird with its wings flaps should support the body in the air, as well as provide forward movement. The creation of lift is necessary to overcome the force of attraction. For penguins, lift is not needed. The density of water is equal to the density of the penguin's body (zero buoyancy), so the penguin flaps its wings only to move forward.
Blades and paddles
Considering how to move in water, we should include the use of blades and oars. When moving through water ducks use their webbed feet as blades. Water striders use their legs as oars and move forward like small boats.
What do we know?
Research at MIT led researchers to the idea of using a fluid dynamic parameter known as the Strohal Index. For fish, this parameter is calculated by multiplying the frequency of the tail of the fish by the width of the resulting vortex divided by the speed of the fish. Were investigated fish of different breeds. It turned out that the efficiency of the fish is maximum when the Strohal index is in the range of 0.25-0.35.
When the fins of the robot fish created at MIT were altered and tuned so that the Strohal index fell into this range, the efficiency of the device increased to more than 86%. This is a great achievement compared to propellers, providing an efficiency of not more than 40%.
We start the project
This chapter discusses the two main projects of underwater robots. One of them provides for the alteration of a toy submarine, and the other - the manufacture of robot fish from scrap materials.
Submarine
Model toy submarines are manufactured and sold by many companies. Their capabilities depend on the degree of complexity of the model, but they are usually controlled by radio and are able to sink and float (see Fig. 13.2).

Fig. 13.2. Toy submarine is ready to be altered in TROV
When reworking a toy submarine, I advise you to abandon the radio control and go to wire control using the appropriate cable. Using a special cable, power and control signals can be brought to the submarine.
Such hobby submarines can be turned into small tele-tracking systems. The initial alteration may be the installation of a color video camera. Most of these boats have empty compartments where you can install an electronic circuit (see. Fig. 13.3).

Fig. 13.3. Open compartment for electronic components
Most of the units used in a remote-controlled vehicle can be installed in a submarine (see Chapter 9). The only difference is the wire control instead of the radio channel.
The submarine is a toy, so it is better not to run it in open water. Tiny water propellers in such boats can only work in calm water. Of course, the creation of such a boat can serve as a start for more advanced designs.
Are there any other ways to use such boats, except for using them as underwater "observers"? I can imagine 10 or more submarines in one pool, and each one is managed by a separate operator. I am sure that on this base you can create a lot of underwater or "space" scenarios of interesting games.
Swimming with the tail
As already stated, devices that mimic the movement of fish have a very low efficiency. This model is no exception. However, a careful collection of information sources such as MIT can help create a model (here it is not done) with much greater efficiency. And if someone wants to make robots androids that have the shape of an animal, then you can start with this project.
Ring solenoidsThe movement of the robot fish is provided by an annular solenoid (see Fig. 13.4). When the power is turned on, the upper part of the solenoid rotates at an angle of about 30 °. When the power is turned off, the spring returns the mechanism to its original position.

Fig. 13.4. Open compartment for electronic components
At the top of the solenoid are at least two 1.6 mm threaded holes, which can be used to fasten parts. In the lower part of the solenoid there are two racks with a 1.6 mm thread for fastening the solenoid. The solenoid turned out to be not as powerful as I would like, but it is still enough to provide underwater advancement.
Electrical circuitTo generate a slow pulse sequence, a single junction Q1 (UJT2646) transistor was used in the circuit (see fig. 13.5). The frequency of the pulses is determined by the values of C1 and R1. Pulses are fed through resistor R2 to base Q2. Q2 is an NPN type 2N2222 transistor. Transistor Q2 is used to supply an inverted pulse to pin 2 of IC 1. IC 1 is a timer 555 connected in the one-shot circuit. The shape and length of the pulse are determined by the IC 1. The output of the timer 555 controls the switching on of the transistor Q3. Transistor Q3 controls the current flowing through the ring solenoid used in the robot.
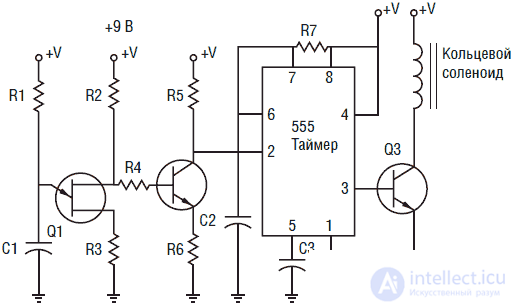
Fig. 13.5. Schematic diagram of the device
The circuit is powered by a 9V battery. The circuit is quite simple and is mounted on a printed circuit board.
Check the operation of the circuit by connecting it to the solenoid before further assembly. The time constant of the solenoid should be in the region of 1 s.
MechanicsTo reduce the overall weight and weight of the device, most parts are made of aluminum. The first version of the mechanism transmitting the movement of the solenoid to the flapping tail of the “fish” is shown in fig. 13.6. It turned out that such a mechanism is more complicated than required. The final version of the tail drive is shown in fig. 13.7.
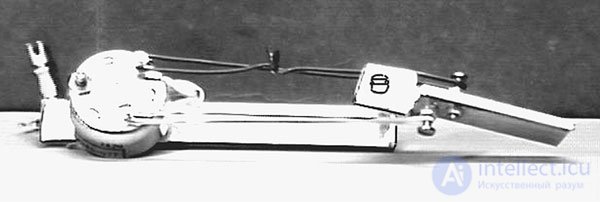
Fig. 13.6. The initial drive of the movement of the tail
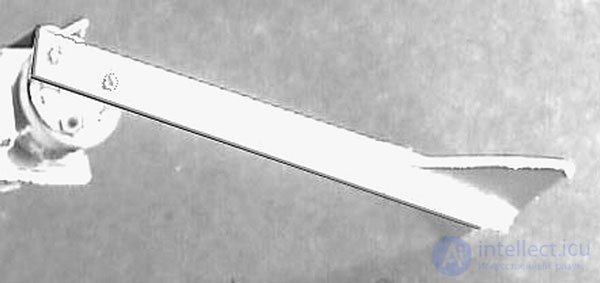
Fig. 13.7. Final Drive
A 3x 12x 140 mm aluminum strip is attached to the top cover of the solenoid with two 1.6 mm screws and a length of 6 mm. Drill first two holes in the aluminum strip, coinciding with the position of the holes in the top of the solenoid. Then, in order to prevent unnecessarily deep screwing of the screws into the solenoid, first screw the nut onto each screw as far as it will go. If the screws are too deeply screwed into the upper movable part of the solenoid, then they will prevent its easy rotation. Attach the aluminum strip to the moving part of the solenoid.
The fin of the tail is made of a square piece of aluminum 30 mm cut diagonally. The fins are attached to the base of 12 mm with a sufficient amount of hot melt glue. For better contact, you can pre-clean the surface with emery paper.
The solenoid is attached to the rear of the aluminum plate with dimensions of 3x30x50 mm on the two rear 1.6 mm racks with several nuts. An electrical circuit board and a battery are attached to the front (see Fig. 13.8).
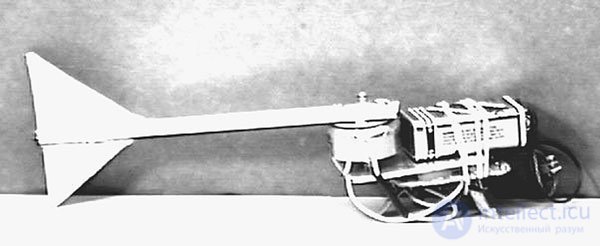
Fig. 13.8. Robot Fish Assembly
We manufactured the solenoid drive and the electrical circuit. To prevent the ingress of water, which can lead to damage to the device, it is necessary to wrap the solenoid board in a thin transparent film used in cooking. The cover of the film is attached to the tail with a wire. The mount should provide easy lateral movement of the tail.
Before lowering the device in water, it is necessary for it to provide zero buoyancy. If you lower it into the water “as it is”, then the front heavy part of the robot “dives” to the bottom, and the tail wag will be carried out “in the air”. Using rubber tape, attach the foam strips to the front of the model on top of the transparent cover. Put the model in the water for testing. Achieve horizontal or nearly horizontal equilibrium. After that, you can turn on the model and release it in the "swimming".
Model efficiencyThis model of the robot does not have the efficiency of a real live fish, although it provides movement. I think that the efficiency of the device can be increased by cutting an aluminum tail plate 12x 140 mm in half, and then connecting the halves using a 50 mm spring. Such a spring will allow the tail to turn and bend, which can provide greater efficiency of movement.
Fish android
The robot differs from the android in its appearance. If the robot looks like a "robot", then the android copies the image of a person or other living creature. For this reason, an android fish should have the appearance of a fish.
Creating an android fish is not as difficult as it may seem at first glance. The reason is that you can buy a fairly well-made artificial "skin" of fish (see. Fig. 13.9). Such items are sold in stores "hobby" and illusion props. Such a fish may be a "reversal" for installation inside the appropriate mechanism.
Fig. 13.9. Robot fish encased in rubber fish
Some types of these models look more natural. I found a model made from thick and soft rubber. Such a “fish” looks and feels very realistic, but requires a more powerful “stuffing” so that it can move. The best choice may be less natural fish models that have a thinner skin and, therefore, require less effort to move them.
Additional Information
To learn more about devices using the fish movement principle, you can read the following articles: Scientific American, March 1955, An An Efficient Swimming Machine by Micheal S. Triantafyllou and George S. Triantafyllou, and Exploring Biomechanics, by R.McNeill Alexander, published in Scientific American Library, 1992, ISBN 0-7167-5035-X.
Parts list for robot fish
• R1 33 kΩ
• R2 and R6 100 Ohm
• R3 470 Ohm
• R5 10 kΩ
• R7 15 kΩ
• Q2 NPN 2N2222 transistor
• Q3 TIP 120 NPN Darlington
• IC1 timer 555
• C1 and C2 22 μF
• C3 0.01 μF
• Ring solenoid $ 5.95
• Q1 2N2646 UJT $ 5.95
• Aluminum strip 3x12x150 mm
• Aluminum strip 3x30x50 mm

Comments