Lecture
Previously, the potential field was defined as an additional cost function in the planning of robot movements, but the potential field can also be used to directly generate the robot's trajectory, which makes it possible to completely abandon the path planning stage. To achieve this goal, it is necessary to determine the attracting force that attracts the robot arm in the direction of its target configuration, and the potential field that repels the arm that pulls the arm from obstacles. Such a potential field is shown in the figure. Its only global minimum is the target configuration, and the cost is measured by the sum of the distance to the target configuration and the distance to the obstacles. For the formation of the potential field shown in this figure, no planning was required. Thanks to this, their potential field features can be successfully applied in real-time control. The figure shows two trajectories of a robot ascending to a peak in a field of potentials with two different initial configurations. In many applications, the potential field can be efficiently calculated for any particular configuration. In addition, potential optimization is reduced to calculating the potential gradient for the current configuration of the robot. Such calculations are usually extremely efficient, especially compared to path planning algorithms, which are associated with costs characterized by an exponential dependence on the dimensions of the configuration space (on degrees of freedom).
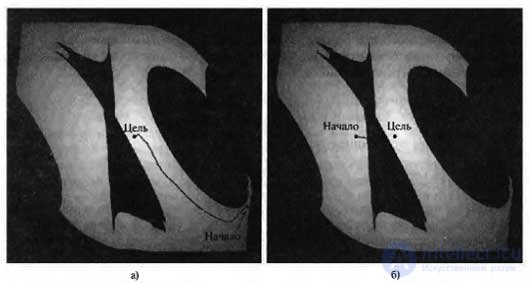
Control method based on the potential field. The trajectory of the robot rises in the gradient of the potential field, consisting of repulsive forces due to the presence of obstacles and attracting forces that correspond to the target configuration: successfully completed path (a); local optimum (b)
The fact that the approach based on the potential field allows us to find the way to the goal so efficiently, even if one has to travel long distances in the configuration space, calls into question the expediency of using planning in robotics. Do methods based on the potential field allow us to solve all the problems, or is this situation, as in this example, simply the result of a favorable set of circumstances? The answer lies in the fact that in this case, the circumstances did develop favorably, while in other conditions the potential fields have many local minima that can become a trap for the robot. In this example, the robot approaches an obstacle, rotating the hinge of its shoulder until it reaches a dead end, being on the wrong side of the obstacle. The potential field does not have a sufficiently developed configuration in order to force the robot to bend its elbow, which would allow it to skip the manipulator under the obstacle. In other words, methods based on the potential field are excellently suited for local robot control, but still require global planning. Another important disadvantage associated with the use of the potential field is that the efforts generated by this approach depend only on the positions of the obstacle and the robot, and not on the speed of the robot. Thus, the control method based on the potential field is actually kinematic and may not be applicable for a fast-moving robot.

Comments
To leave a comment
Robotics
Terms: Robotics