Lecture
The word "robotics" (in its English version of "robotics" ) was first used in print by Isaac Asimov in the science fiction story "Liar", published in 1941.
The word “robotics” was based on the word “robot”, invented in 1920 by the Czech writer Karel Chapek for his science fiction play “R. W.R. "(" Rossum Universal Robots "), first produced in 1921 and enjoyed success with the audience. In it, the owner of the plant organizes the release of many androids, which first work without rest, but then rebel and destroy their creators.
However, some ideas that later became the basis of robotics appeared in ancient times - long before the introduction of the above terms. Thus, in the Iliad of Homer it is said that the god Hephaestus made speaking maidservants of gold, giving them intelligence (i.e., in modern language, artificial intelligence) and strength. Ancient Greek mechanics and engineer Arhita Tarentskomprivlyuyut the creation of a mechanical pigeon that can fly (c. 400 BC). A lot of such information is contained in the book “Robotics: History and Prospects” by I. M. Makarov and Yu. I. Topcheev, which is a popular and thorough story about the role that robots played (and will play) in the history of the development of civilization.
Robots are physical agents that perform the tasks assigned to them by performing manipulations in the physical world. For this purpose, robots are equipped with actuators , such as legs, wheels, hinges and grippers. The actuators have a single purpose - to make physical efforts to the environment. In addition, robots are equipped with sensors that allow them to perceive data about their environment. Modern robots use various types of sensors, including those designed to measure the characteristics of the environment (for example, video cameras and ultrasonic range finders), and those that measure the movement characteristics of the robot itself (for example, gyroscopes and accelerometers).
Most modern robots fall into one of three main categories. Robotic arms, or robotic hands, are physically attached to their workplace, for example, on a factory assembly line or aboard the International Space Station. The whole chain of controlled joints is usually involved in the movement of the manipulator, which allows such robots to set their actuators in any position within their working space. Manipulators are of the type of the most common industrial robots, since over a million of these devices are installed worldwide. Some mobile manipulators are used in hospitals as surgeons' assistants. Without robotic manipulators in our days, most automobile plants will not be able to continue their production activities, and some manipulators have even been used to create original works of art.
The second category includes mobile robots. Robots of this type move within their environment using wheels, legs or similar mechanisms. They found their use in the delivery of meals in hospitals, when moving containers in cargo docks, as well as when performing similar tasks. An example of a mobile robot is an automatic ground vehicle (Unmanned Land Vehicle - ULV) NavLab, which can autonomously move along highways in self-driving mode. Other types of mobile robots include an automatic air vehicle (Unmanned AirVehicle - UAV), commonly used for aerial surveillance, chemical land management and military operations, an autonomous underwater vehicle (Autonomous Underwater Vehicle - AUV), and a rover, such as the Sojourner robot, shown in a).
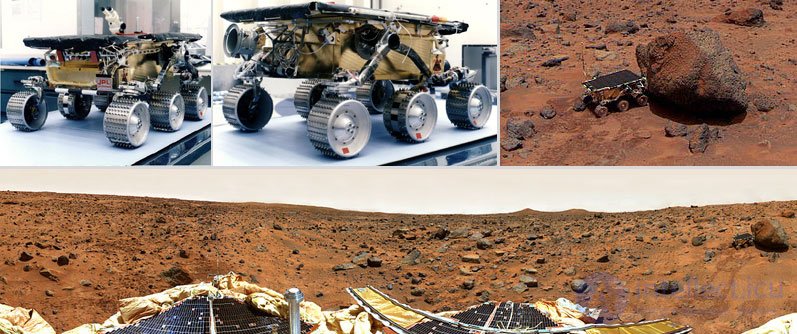
Photos of well-known robots: NASA's Sojourner moving robot, which examined the surface of Mars in July 1997 (a) ;
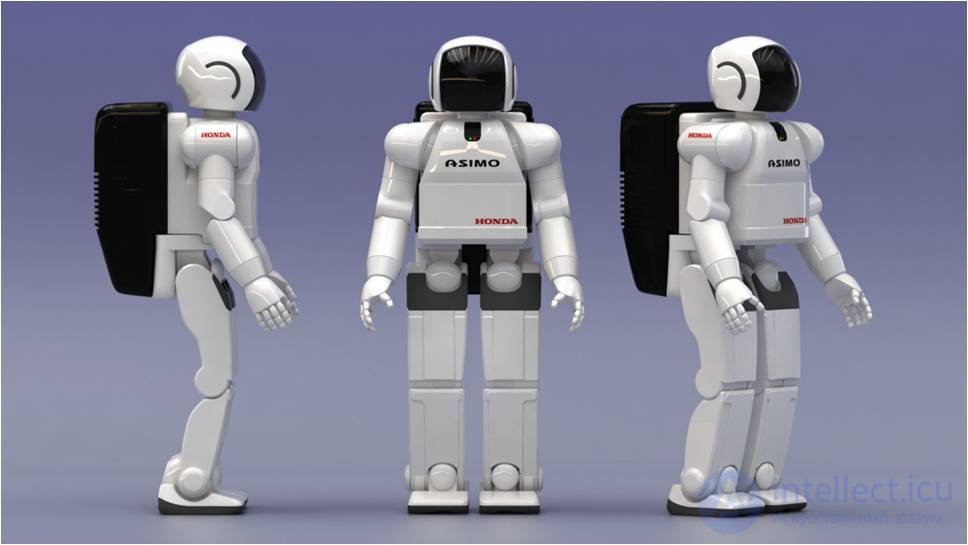
humanoids RZ and Honda Asimo (b)

Robota company Boston Dynamics - an engineering company specializing in robotics. Known for the development of the order DARPA for military purposes quadruped robot BigDog. Available types: BigDog, CHEETAH, LittleDog, RiSE,
PETMAN, Atlas
Handle.

Sofia speaks at the International Artificial Intelligence Summit, ITU, Geneva, Switzerland, June 7–9, 2017
The third type includes hybrid devices - mobile robots equipped with manipulators. These include humanoid robots , which by their physical construction resemble the human body. Two such humanoid robots are shown in Figure b) ; both are made in the Japanese corporation Honda. Hybrid robots are able to extend the action of their actuators to a wider working area compared to manipulators attached to one place, but are forced to perform the tasks before them with great effort, since they do not have such a rigid support as provided by the manipulator mounting unit.
The field of robotics also includes prosthetic devices (artificial limbs, ear and eye prostheses for people), intelligent life support systems (for example, entire houses equipped with sensors and actuators), as well as multi-body systems in which robotic actions are carried out using whole hordes of small robots uniting their efforts.
Real robots usually have to operate in environments that are partially observable, stochastic, dynamic and continuous. Some variants of the habitat of robots (but not all) are also consistent and multi-agent. Partial observability and stochasticity due to the fact that the robot has to deal with a large, complex world. The robot cannot look behind every corner, and the commands to perform the movements are not carried out with complete certainty due to slipping of the drive mechanisms, friction, etc. In addition, the real world stubbornly refuses to act faster than in real time. In a simulated environment, it is possible to use simple algorithms to determine the necessary parameters with the help of training, making millions of attempts in just a few hours of CPU time, and in a real environment it may take years to complete all these attempts. In addition, real accidents, unlike simulated ones, do cause damage. In practical robot systems, it is necessary to introduce a priori knowledge about the robot, its physical environment and the tasks that it must perform in order to quickly undergo training and act safely.

Comments
To leave a comment
Robotics
Terms: Robotics