Lecture
Synthetic psychology
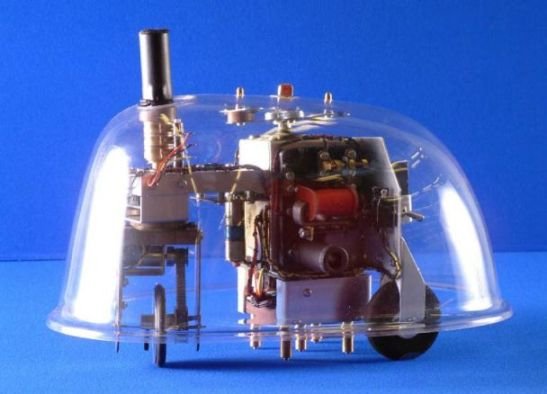
In the photo is Gray Walter's bug Sometimes synthesis is easier than analysis. It is difficult to understand how the brain works at a low level, but you can try to imitate behavior as <input-output>. The purpose of this direction is the creation of behavior simulators. Such imitators were created by various groups of researchers - Amosov, Breitenberg, Walter and others. At the lower levels, machines imitated the simplest emotions and behavior (fear), at the upper levels, more abstract and complex (premonition, love). On the simplest model, you can see interesting psychological reactions. | ||||||||||||||||||||||||||||||||||
Consider the “Turtle” by G. Walter, which he called “The Speculator Machine”, which means the “thinking machine”. "Turtle" is a three-wheeled cart, which houses the batteries, relay system and electronic (lamp) circuit. The front wheel is located on the steering column and is driven by two engines - steering D 1 and driving D 2 . On the steering column is also fixed photocell and a light bulb, the light from which does not fall on the photocell. The cart is covered with a casing resembling a turtle shell in shape and leaving only a photocell and a light bulb open. Around the housing casing is an elastic bumper, the touch of which closes the mechanical contact K 1 . | ||||||||||||||||||||||||||||||||||
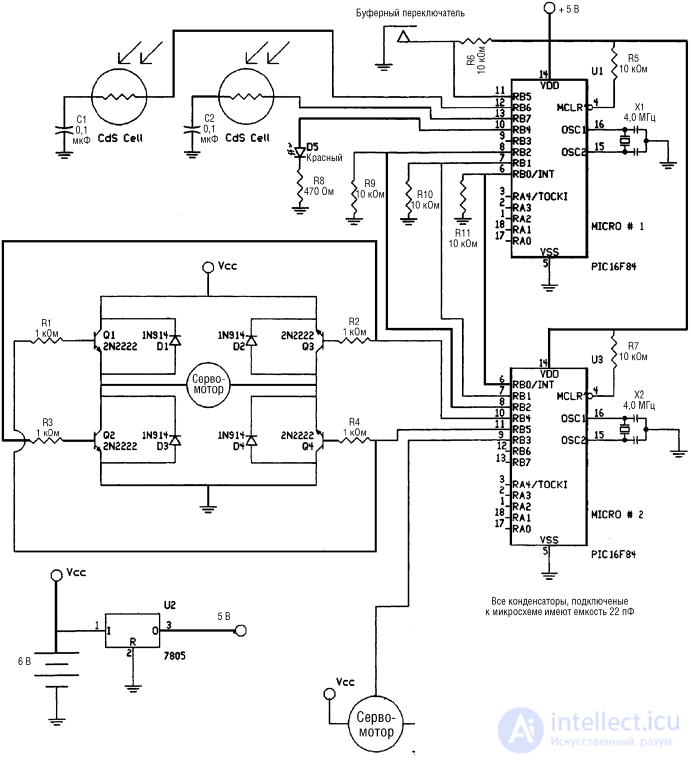
The schematic diagram of the "Turtle" is shown in Figure 12.1. | ||||||||||||||||||||||||||||||||||
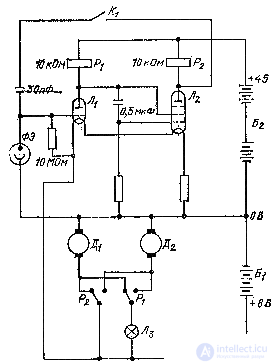 fig.12.1 | ||||||||||||||||||||||||||||||||||
Fig. 8.16. Electrical circuit diagram of a robot turtle A “turtle” with such a scheme is capable of reproducing the following types of behavior: movement into or out of the light, search movements, bypassing an obstacle, movement towards the “feeding trough” and entering into it to recharge batteries. The circuit is adjusted so that when the anode potential of the lamp L 1 is low, the lamp L 2 is locked and the relay P 2 is set so that the simultaneous presence of the relay P 1 and P 2 under current is excluded. If the PV cell of the PV is not illuminated, then the lamp L 2 is open, and L 1 is locked. Under moderate photocell illumination, the L 2 “opens up” lamp, however, the current it conducts is insufficient to trigger relay P 1 , although a decrease in the voltage at the anode of the lamp causes the release of relay P 2 . A further increase in the illumination of the photocell (“blinding”) leads to the triggering of P 1 when P 2 is released. The closure of the mechanical contact K 1 turns the circuit into a multivibrator, alternately switching on and off the relay P 1 and P 2 . | ||||||||||||||||||||||||||||||||||
The behavior of the "Turtle" depends on external influences, i.e. from the relay states and is characterized by the following table. | ||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||
Despite the relative simplicity of the device, "Turtle" demonstrates quite diverse types of behavior. Under normal conditions, it carries out a “search”, moving along the trajectories it forms, and for an hour is able to explore a rather large room. When light hits the photocell, it either approaches the light source (in low light or dead batteries), or moves away from it (in strong “blinding” light). When hitting an obstacle - no matter what other stimulus acted - the machine only responds to touch, which is a stronger stimulus, and moves away from the obstacle. After the waste maneuver, he continues to move under the influence of the remaining stimulus. "Turtle" is able to find the optimal condition for itself, which is the search in dimly lit places. The lamp L 3 , located in front of the device, allows it to “recognize” itself in the mirror in the absence of other light sources, approaching its image. In the same way, two machines can "see" each other and move towards. When batteries are partially discharged, the ability to avoid “blinding” weakens and the Turtle approaches the “feeder” in which the light source is installed, and when it comes into contact with the contacts of the charger in it, “saturates” and then (“blinding” occurs) moves away from her and continues to normal activity. Below are examples of different behavior of the "Turtle": search in the absence of bright light, the desire for a not very strong light source, the behavior in the presence of two strong sources of light, the avoidance of an obstacle with the desire for light, the desire for one light source of two identical automata, a visit to the "feeder ", the behavior in front of the mirror and the" acquaintance "of the two" Turtles ". It is easy to see that the behavior of the automaton is in many respects analogous to the complex of fixed actions observed in the behavior of living organisms. Note that it is impossible to establish the exact trajectories of movements in advance. In each case, they are determined by a number of random factors, such as the roughness and inclinations of the surface along which the machine moves, the friction in its moving parts, the scatter of the relay response times, etc. | ||||||||||||||||||||||||||||||||||
About machines Breytenberg - machines with synthetic psychology, you can read more details ... | ||||||||||||||||||||||||||||||||||
A total of 14 levels of such animals were built. At the third level, we managed to implement the predator-prey scheme. On the fourth - the machines distinguished living from nonliving, skirting obstacles. On the fifth implemented the simplest training. At 6-8 levels learned to generalize. At 14, they developed a scale of values, found a line to achieve the goal as quickly as possible, and created an internal model of the world. | ||||||||||||||||||||||||||||||||||
A significant drawback - there is no self-production and evolution. | ||||||||||||||||||||||||||||||||||
Recognition and classificationOne of the most important intellectual properties. All devices that implement this property must have three blocks. | ||||||||||||||||||||||||||||||||||
 | ||||||||||||||||||||||||||||||||||
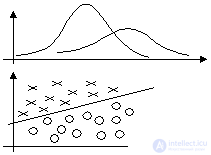
The task is to separate a sample of type A from a sample of type B, for this it is required to enter a physical quantity that would distinguish samples of different types. Obviously, this value will have a whole range of values and choosing a certain identifying attribute we can face the overlap problem (upper graph), that is, the situation of the presence of this feature in both samples. Therefore, it is required to unfold the base axes so that the projections of the various classes intersect minimally (lower graph). | ||||||||||||||||||||||||||||||||||
 | ||||||||||||||||||||||||||||||||||
The task of intelligence is to find the lines of class division. For better results, additional features are required. Each is useful for at least one division and affects the reduction of the likelihood of error. The best signs are those in which the difference in averages is higher than standard deviations. A sign will be useless if the averages coincide with the averages of another sign. A lot of signs increase the likelihood of error. | ||||||||||||||||||||||||||||||||||
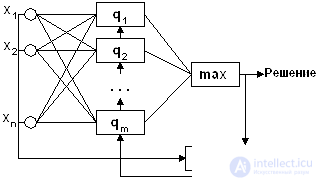 fig.12.4 Signs (x 1 .. x n ) are analyzed by separating functions (q 1 .. q m ). The solution comes from a comparison device. | ||||||||||||||||||||||||||||||||||
Similarity measuresx ij - the value of the i-th variable for the j-th object.1. The correlation coefficient 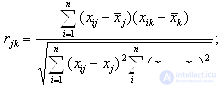 2. Measures of distance a) Euclidean 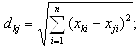 b) Manhattan 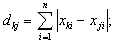 c) Minkowski 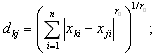 3. The coefficient of associativity but) S = (a + d) / (a + b + c + d); b) J = a / (a + b + c); at) K ac = (ad - bc) / (ad + bc); | ||||||||||||||||||||||||||||||||||
see also
* A. K. Dyudni. Braidenberg cars - machines with synthetic psychology. (http://myrobot.ru/articles/stuff_braitenberg.php)
* Gray Walter's turtles (http://www.myrobot.ru/articles/hist_walter_tortoises.php)
* Vladimir Redko. Evolutionary Bio-Cybernetics Computerra No. 11 dated March 16, 1999 (http://www.computerra.ru/offline/1999/289/2525/)
* History of Robotics: Gray Walter's turtles. (http://www.myrobot.ru/articles/hist_walter_tortoises.php)
* A. K. Dyudni Machines of Breitenberg - machines with synthetic psychology
(http://myrobot.ru/articles/stuff_braitenberg.php)
* D. Dennett. Types of psyche (http://psylib.org.ua/books/dennd01/txt07.htm)
* V. Braitenberg "Vehicles: Experiments in Synthetic Psychology", A Bradford Book / The MIT Press, 1984 ISBN 0262521121 (V. Breitenberg. Moving vehicles (devices, cars)): experiments with synthetic psychology)
* Michael RW Dawson Minds and Machines: Connectionism and Psychological Modeling 2008 (Chapter 6. First Steps Toward Synthetic Psychology)
* Luc-Laurent Salvador What is Synthetic Psychology? (http://www.synthetic-psychology.org/blogs/?p=17)
* Terekhin A.T., Budilova E.V., Kachalova L.M., Karpenko MP Neural network modeling of cognitive functions of the brain: a review of the main ideas // Psychological studies: electron. scientific journals 2009 - N 2 (4). (http://psystudy.ru/index.php/component/content/article/1-n2-4/26-terekhin4.html#e3)
* Michael RW Dawson. From Embodied Cognitive Science To Synthetic Psychology. 2002
ISBN: 0-7695-1724-2

Comments
To leave a comment
Artificial Intelligence
Terms: Artificial Intelligence