Lecture
Direct is the control, in which the station is controlled directly by signals transmitted from the subscriber terminal (telephone). This method was used in the decade-step PBX.
Its main disadvantages are obvious. They are not even so much in danger of a subscriber’s direct impact on the station, but in the fact that at present automatic devices can perform additional actions in the process of establishing a connection (for example, call routing, accumulation of information, etc.). A person is incapable of this due to the limitations of the physical (speed) and intellectual plan (the amount of information and a multitude of signals).
One and all modern stations apply indirect control. In fig. 1.11 shows the control, distributed in steps. The subscriber level of the AI has a control device called a “marker” in the coordinate PBX. Similarly, group search stages have their own control devices — GI-MGI markers. The figure also shows the Subscriber set - AK, which performs the interface with the subscriber line, namely: receiving a call signal, blocking the set and in some cases sending a "busy" signal.
The principle of operation of this kit will be discussed below. The illustration shows the following cord sets:
Together, these kits provide for the reception and transmission of signals in the process of an established connection, called interaction signals. These include:
They are transmitted and received in the PBX of the coordinate system with cord sets.
Signals transmitted between registers and control devices (in the coordinate PBX, these are markers) are called control signals. The control signals provide information about the dialed digits (the address of the end point), as well as information about the progress of the connection.
These may include the following signals: "no free lines", employment of a subscriber by a local or long-distance call, and many others transmitted in the process of performing basic and supplementary services.
With indirect control, all these signals are received and processed by the station control device. In the coordinate PBX, such devices are a register and a multi-frequency transceiver, which allow to ensure reliable transmission of these signals over long distances. In fig. 1.11 two main ways of transmitting control signals are shown: the first (fig. 1.11a) - “relay race” and the second (fig. 1.11b) - “from end to end”.
Signals from the subscriber, transmitted by means of a frequency or disk dialer, are accumulated in a device allocated for this purpose - a register. Further, the process of establishing a connection is carried out under the control of the register with the help of special means allowing the exchange of signals with control devices.
In fig. 1.11a control signals are transmitted by the register of the outgoing station to all network control devices.
In fig. 1.11b signal is transmitted "on the relay." Each device receives the full information necessary to establish a connection, and sends it on its own.
These are two extreme cases. There are intermediate options when information should be accumulated only when switching to a network with other principles for establishing a connection.
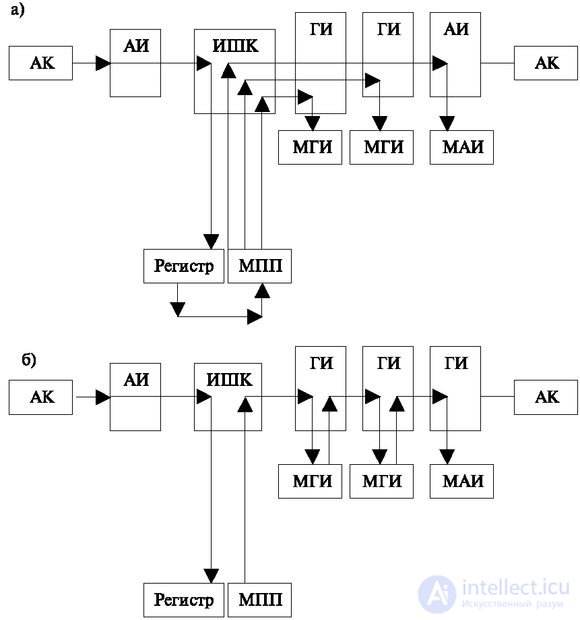
Fig. 1.11. The principle of transmission of control signals: a) "from end to end" b) "relay race"
The general control considered at the beginning of this lecture (Fig. 1.1), characteristic of the first program-controlled stations, is that a single device controls the whole station. However, today such a decision is no longer rational; other options have appeared in its place. But the principles of the basic solution are still very useful and in various forms appear in different parts of other, more modern management principles. Therefore, we consider the main considerations that affect the choice of a solution when building a management system for telephone exchanges.
Centrally controlled system
The main factors influencing the choice of management system are:
Each of the consumers of the switching system wants its system to evolve from small capacity to as large as possible. This saves initial costs and during the operation of the station allows gradually, as incomes appear, increase its capacity. Similarly, the consumption of services grows gradually as they are introduced, so flexibility in introducing services is also one of the important indicators of the system. Fig.1.12 shows the desired adaptation of the system in the case of increasing the capacity of the station.
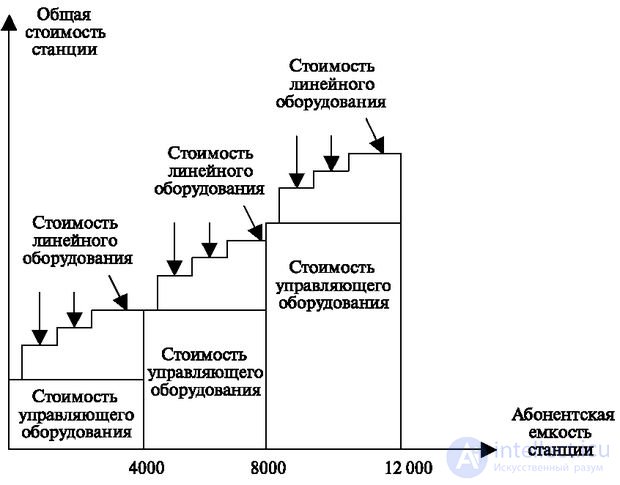
Fig. 1.12. Desired cost adaptation when increasing station capacity
With centralized management (Fig. 1.13), the constant component of the equipment is always large, which is installed at the station regardless of capacity.

Fig. 1.13. Adaptation of cost when increasing station capacity in case of centralized management
First of all, these are control devices, which to this day constitute a significant part of the cost. In this method, centralized management requires the installation of control equipment, calculated from the main characteristics to control the station from the minimum and maximum cost. Therefore, the cost of the station is especially high for small tanks at the beginning of the launch of the station.
Ensuring the reliability of controls allows you to increase the survivability of the station. It is clear that the role of communication in the life of society is large and therefore even the temporary cessation of the work of telephone exchanges entails very serious consequences. A telephone exchange control unit is one of the most important systems affecting its reliability.
The central station management system is very vulnerable. Its reliability is determined by the reliability of the control device. The technical conditions indicate the total station downtime - 2 hours in 40 years. In the theory of reliability, a more rigorous term is used - the availability factor (Kgot).
K goth = (T slave -T ol) / T slave = 1- (T ol / T slave ) = 0,9999943
To ensure this availability factor, at least duplication of the control device is necessary. The following options are theoretically possible:
In practice, the second option is preferable. In the first case, in case of a “working” device failure, the backup does not have any operational information about the established and installed connections. We have to bring the entire station to its original position and work with data that is in its original state. This process is called a complete reboot of the station.
| Recovery Mode Name | Conditions of the regime | Approximate recovery time (for a telephone exchange) | Possible actions |
|---|---|---|---|
| Saving Connected Connections | The localization time and the transition to the reserve should not exceed the lifetime of the shortest external signal | 10 ms (Recognition time of the shortest dial pulse) | Correction of data in RAM |
| Saving established connections | The time of localization and transition to the reserve does not exceed the time taken to occupy the devices with one connection | 3 min. (average talk time) | Switch to peripheral backup control |
| Maintaining the health of the control device | Signal about software failure, which requires localization and recovery time, more than indicated in previous cases | Analysis time of the software and computer crash signals. And software recovery | Reloading software from backups |
| Restore the station to its original state | Failure of hardware or software assets | Time of diagnostics of all instruments and software of the station, rewriting time of backup software, restoration of the initial state of all instruments of the station and system settings | Restoring the original position of all station instruments and software with automatic or manual control. System installations and post-crash |
Although not always the original state can give a guarantee of proper operation. For example, blocking of faulty devices, etc. may be lost.
Theoretically, there are four levels of recovery at the telephone exchange (Table 1.1). It should be noted that these levels also exist in non-telephone systems, but the conditions that determine the modes (recovery times) are different.
To limit the consequences of losing operational information, the “traffic sharing” duplication method is used. In this case, each of the control devices in normal mode works with its equipment. In the event of an accident, the working computer takes over the entire load. At the same time, operational information for a part of the equipment is lost, and information regarding the long-term state of the station (for example, information about long-term blocking) can be duplicated in both control devices.
To reduce the transition time to the reserve and eliminate information loss, the most common is the system of "duplication with synchronization". In this case, the signals from the external environment come to both control devices, and the external environment control commands are normally sent from one device. In emergency mode, a working device works without the need to correct information.
This mode also allows you to monitor the normal operation of devices and identify failures and errors in the early stages of their appearance. To do this, a communication channel is established between the duplicating devices, through which it is possible to compare the results of their work: for example, when issuing commands to the external environment or when writing the results into memory. The more detailed the comparison, the more accurate and faster the monitoring and diagnostics will be. But at the same time, the processes associated with maintenance require a lot of computer and software resources (memory and runtime), and a small percentage of productivity remains on basic services, which leads to a decrease in throughput, or a reduction in the service group, or a decrease in the list of services to subscribers.
Hierarchical control systems
Hierarchical control systems are an intermediate type between centralized and decentralized management methods. In "pure form" it is rarely used. Based on very similar principles, the AX switching system (Ericsson, Sweden) used in operation and networks has been built. The block diagram of the control device constructed according to the hierarchical principle is shown in fig. 1.14.
In this case, all tasks are divided into hierarchy levels and distributed among processors. The first and main advantage of such a partition is the reduction in performance requirements for processors.
In addition, the division of tasks by processors limits the consequences of the failure of individual processors, - in such a local accident, only one function of the system is terminated. For higher reliability, redundancy can be applied at any level and by any principle (hot standby, load sharing, etc.).
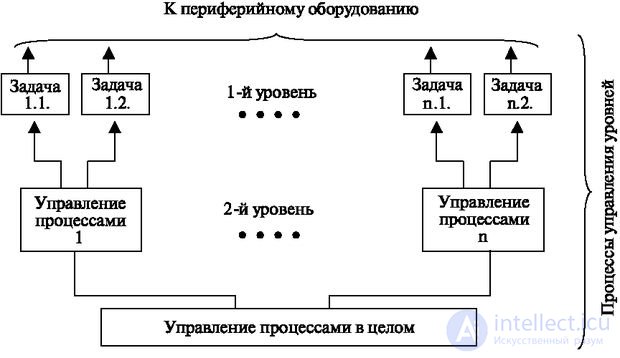
Fig. 1.14. Hierarchical management principle
Decentralized management systems
These systems are most widely used at telephone exchanges, as they satisfy the basic principles of adapting systems and ensuring their reliability [8], [35], [9]. The system is divided into modules (often in the requirements on the system is written that "the system is built on a modular principle"). Each module is designed to serve a limited group of external sources or to perform a limited task (sometimes restrictions apply to the number and functions) (Fig. 1.15).
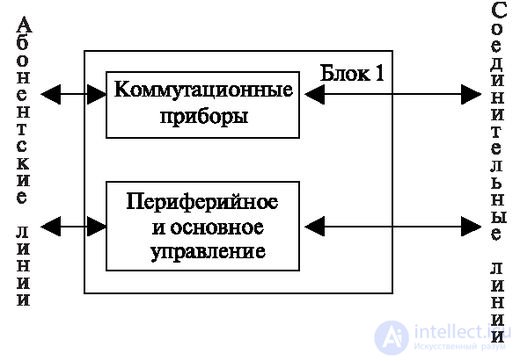
Fig. 1.15. One unit system with decentralized control
Each of the stations is recruited from such modules in accordance with the currently required capacity and tasks. The smaller the capacity of the lines or devices contained in the module, the more accurate the adaptation.
The module has its own control in the form of a microprocessor and switching devices for interacting with the outside world (most often at the physical and channel levels). A small switching field makes it possible to connect terminals to the central switching field most efficiently. There are several ways to build systems with a decentralized control method.

Comments