Lecture
Teaching with the teacher (English Supervised learning ) is one of the methods of machine learning, during which the test system is forcibly trained using examples of "stimulus-response". From the point of view of cybernetics, is one of the types of cybernetic experiment. There may be some dependence between inputs and reference outputs (stimulus-response), but it is not known. Only a finite set of precedents is known — the stimulus-response pairs, called the training set . Based on these data, it is required to restore the dependence (build a model of stimulus-response relationships suitable for prediction), that is, to build an algorithm capable of producing a reasonably accurate answer for any object. To measure the accuracy of the answers, as well as in the example training, the quality functional can be introduced.

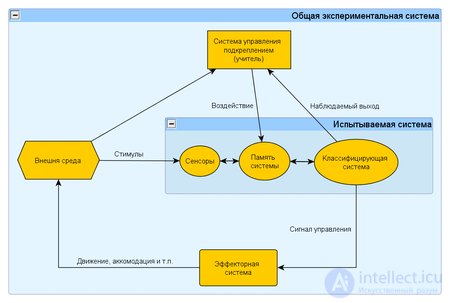
This experiment is a special case of a cybernetic experiment with feedback. The formulation of this experiment implies the existence of an experimental system, a training method, and a method for testing a system or measuring characteristics.
The experimental system, in turn, consists of the test (used) system, the space of stimuli obtained from the external environment and the reinforcement control system (regulator of internal parameters). As a reinforcement management system, an automatic regulating device (for example, a thermostat) or a human operator ( teacher ) can be used to respond to the reactions of the system under test and the external stimuli by applying special reinforcement rules that change the state of the system’s memory.
There are two options: (1) when the reaction of the system under test does not change the state of the external environment, and (2) when the system’s reaction changes the stimuli of the external environment. These schemes indicate the fundamental similarity of such a system of a general form with the biological nervous system.
This distinction allows for a deeper look at the differences between different ways of learning, since the line between teaching with a teacher and learning without a teacher is more subtle. In addition, this distinction made it possible to show for artificial neural networks certain restrictions for S and R-controlled systems (see Perceptron Convergence Theorem).
This article is about neural networks; For information error correction in computer science, see: Error detection and correction.
Error correction method is the perceptron learning method proposed by Frank Rosenblatt. It is a learning method in which the weight of a bond does not change as long as the current reaction of the perceptron remains correct. If an incorrect reaction appears, the weight changes by one, and the sign (+/-) is determined opposite to the error sign.
In the perceptron convergence theorem, different types of this method differ, it is proved that any of them allows to obtain convergence when solving any classification problem.
If the response to the stimulus  correct, no reinforcement is entered, but if errors occur, the value of each active A-element is added
correct, no reinforcement is entered, but if errors occur, the value of each active A-element is added  where
where  - the number of reinforcement units, is chosen so that the magnitude of the signal exceeds the threshold θ, and
- the number of reinforcement units, is chosen so that the magnitude of the signal exceeds the threshold θ, and  , wherein
, wherein  - an incentive belonging to the positive class, and
- an incentive belonging to the positive class, and  - an incentive belonging to the negative class.
- an incentive belonging to the negative class.
It differs from the error correction method without quantization only in that  , i.e. equal to one reinforcement unit.
, i.e. equal to one reinforcement unit.
This method and the method of error correction without quantization are the same in terms of the speed at which the solution is reached in the general case, and more effective than the error correction methods with a random sign or random perturbations .
Differs in that reinforcement sign  It is chosen randomly, regardless of the reaction of the perceptron, and with equal probability can be positive or negative. But just like in the base method - if the perceptron gives the right response, then the reinforcement is zero.
It is chosen randomly, regardless of the reaction of the perceptron, and with equal probability can be positive or negative. But just like in the base method - if the perceptron gives the right response, then the reinforcement is zero.
Differs in that the magnitude and sign for each connection in the system are selected separately and independently in accordance with a certain probability distribution. This method leads to the slowest convergence compared to the modifications described above.
.
The method of back propagation of error (eng. Backpropagation ) is a method of teaching a multilayer perceptron. The method was first described in 1974. А.I. Galushkin [1] , as well as independently and simultaneously by Paul J. Verbos [2] . Further, it was substantially developed in 1986 by David I. Rumelhart, J. E. Hinton and Ronald J. Williams [3] and independently and simultaneously by S.I. Bartsevym and V.A. Okhonin (Krasnoyarsk group) [4] .. This is an iterative gradient algorithm that is used to minimize the error of the multilayer perceptron and to obtain the desired output.
The main idea of this method is to propagate error signals from the network outputs to its inputs, in the opposite direction to direct signal propagation in normal operation. Bartsev and Okhonin immediately proposed a general method (“duality principle”) applicable to a wider class of systems, including delay systems, distributed systems, etc. [5]
To be able to apply the method of back propagation of error, the transfer function of neurons must be differentiable. The method is a modification of the classical gradient descent method.
Most often, the following sigmoid types are used as activation functions:
Fermi function (exponential sigmoid):
Rational sigmoid:
Hyperbolic Tangent:
 ,
,
where s is the output of the neuron adder,  Is an arbitrary constant.
Is an arbitrary constant.
Least of all, compared with other sigmoids, processor time requires the calculation of a rational sigmoid. The calculation of the hyperbolic tangent requires the most cycles of the processor. If compared with threshold activation functions, then sigmoids are calculated very slowly. If, after summation in the threshold function, you can immediately begin a comparison with a certain value (threshold), then in the case of a sigmoidal activation function, you need to calculate sigmoid (spend time at best on three operations: taking the module, addition and division), and only then compare it with the threshold value (for example, zero). If we assume that all the simplest operations are calculated by the processor for approximately the same time, then the operation of the sigmoidal activation function after the summation performed (which takes the same time) will be slower than the threshold activation function as 1: 4.
In cases where it is possible to evaluate the operation of the network, the training of neural networks can be represented as an optimization problem. To evaluate means to quantify whether the network solves its tasks well or badly. For this purpose, an evaluation function is built. As a rule, it obviously depends on the output signals of the network and implicitly (through functioning) on all its parameters. The simplest and most common example of evaluation is the sum of the squares of the distances from the output signals of the network to their required values:
 ,
,
Where  - the desired value of the output signal.
- the desired value of the output signal.
The method of least squares is not always the best choice of assessment. Careful design of the evaluation function allows an order of magnitude increase in the effectiveness of network training, as well as obtaining additional information - the “level of confidence” of the network in the response given [6] .
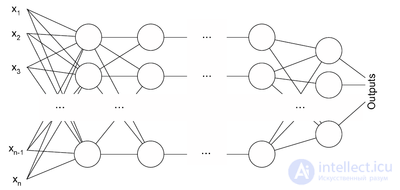
Multi-layer perceptron architecture
The backpropagation algorithm is applied to a multilayer perceptron. The network has multiple inputs.  , multiple Outputs outlets and many internal nodes. Renumber all nodes (including inputs and outputs) with numbers from 1 to N (through numbering, regardless of the topology of the layers). Denote by
, multiple Outputs outlets and many internal nodes. Renumber all nodes (including inputs and outputs) with numbers from 1 to N (through numbering, regardless of the topology of the layers). Denote by  the weight standing on the edge connecting the i th and j th nodes, and through
the weight standing on the edge connecting the i th and j th nodes, and through  - output of the i-th node. If we know the training example (the correct answers are
- output of the i-th node. If we know the training example (the correct answers are  ,
,  ), the error function obtained by the least squares method looks like this:
), the error function obtained by the least squares method looks like this:

How to modify the weight? We will implement a stochastic gradient descent, that is, we will correct the weights after each training example and, thus, “move” in the multidimensional space of weights. To "get" to the minimum of error, we need to "move" in the direction opposite to the gradient, that is, based on each group of correct answers, add to each weight
 ,
,
Where  - a factor that sets the speed of "movement".
- a factor that sets the speed of "movement".
The derivative is calculated as follows. Let first  , that is, the weight of interest to us is included in the neuron of the last level. First, we note that affects network output only as part of the amount
, that is, the weight of interest to us is included in the neuron of the last level. First, we note that affects network output only as part of the amount  where the sum is taken at the inputs of the jth node. therefore
where the sum is taken at the inputs of the jth node. therefore
Similarly  affects the total error only within the jth node output
affects the total error only within the jth node output  (recall that this is the output of the entire network). therefore
(recall that this is the output of the entire network). therefore


Where  - the corresponding sigmoid, in this case - exponential
- the corresponding sigmoid, in this case - exponential


If the j- th node is not at the last level, then it has exits; we denote them by Children ( j ). In this case
 ,
,
and
 .
.
well and  - this is exactly the same correction, but calculated for the next level node we will denote it by
- this is exactly the same correction, but calculated for the next level node we will denote it by  - from
- from  it is distinguished by the absence of a multiplier
it is distinguished by the absence of a multiplier  . Поскольку мы научились вычислять поправку для узлов последнего уровня и выражать поправку для узла более низкого уровня через поправки более высокого, можно уже писать алгоритм. Именно из-за этой особенности вычисления поправок алгоритм называется алгоритмом обратного распространения ошибки (backpropagation). Краткое резюме проделанной работы:
. Поскольку мы научились вычислять поправку для узлов последнего уровня и выражать поправку для узла более низкого уровня через поправки более высокого, можно уже писать алгоритм. Именно из-за этой особенности вычисления поправок алгоритм называется алгоритмом обратного распространения ошибки (backpropagation). Краткое резюме проделанной работы:



where  это тот же
это тот же  в формуле для
в формуле для 
Получающийся алгоритм представлен ниже. На вход алгоритму, кроме указанных параметров, нужно также подавать в каком-нибудь формате структуру сети. На практике очень хорошие результаты показывают сети достаточно простой структуры, состоящие из двух уровней нейронов — скрытого уровня (hidden units) и нейронов-выходов (output units); каждый вход сети соединен со всеми скрытыми нейронами, а результат работы каждого скрытого нейрона подается на вход каждому из нейронов-выходов. В таком случае достаточно подавать на вход количество нейронов скрытого уровня.
Алгоритм: BackPropagation 
 маленькими случайными значениями,
маленькими случайными значениями, 
Для всех d от 1 до m:
 на вход сети и подсчитать выходы каждого узла.
на вход сети и подсчитать выходы каждого узла.
 .
.
Для каждого узла j уровня l вычислить
 .
.
 .
.
 .
.
 .
.Where — коэффициент инерциальнности для сглаживания резких скачков при перемещении по поверхности целевой функции
На каждой итерации алгоритма обратного распространения весовые коэффициенты нейронной сети модифицируются так, чтобы улучшить решение одного примера. Таким образом, в процессе обучения циклически решаются однокритериальные задачи оптимизации.
Обучение нейронной сети характеризуется четырьмя специфическими ограничениями, выделяющими обучение нейросетей из общих задач оптимизации: астрономическое число параметров, необходимость высокого параллелизма при обучении, многокритериальность решаемых задач, необходимость найти достаточно широкую область, в которой значения всех минимизируемых функций близки к минимальным. В остальном проблему обучения можно, как правило, сформулировать как задачу минимизации оценки. Осторожность предыдущей фразы («как правило») связана с тем, что на самом деле нам неизвестны и никогда не будут известны все возможные задачи для нейронных сетей, и, быть может, где-то в неизвестности есть задачи, которые несводимы к минимизации оценки. Минимизация оценки — сложная проблема: параметров астрономически много (для стандартных примеров, реализуемых на РС — от 100 до 1000000), адаптивный рельеф (график оценки как функции от подстраиваемых параметров) сложен, может содержать много локальных минимумов.
Несмотря на многочисленные успешные применения обратного распространения, оно не является панацеей. Больше всего неприятностей приносит неопределённо долгий процесс обучения. В сложных задачах для обучения сети могут потребоваться дни или даже недели, она может и вообще не обучиться. Причиной может быть одна из описанных ниже.
В процессе обучения сети значения весов могут в результате коррекции стать очень большими величинами. Это может привести к тому, что все или большинство нейронов будут функционировать при очень больших значениях OUT, в области, где производная сжимающей функции очень мала. Так как посылаемая обратно в процессе обучения ошибка пропорциональна этой производной, то процесс обучения может практически замереть. В теоретическом отношении эта проблема плохо изучена. Обычно этого избегают уменьшением размера шага η, но это увеличивает время обучения. Различные эвристики использовались для предохранения от паралича или для восстановления после него, но пока что они могут рассматриваться лишь как экспериментальные.
Обратное распространение использует разновидность градиентного спуска, то есть осуществляет спуск вниз по поверхности ошибки, непрерывно подстраивая веса в направлении к минимуму. Поверхность ошибки сложной сети сильно изрезана и состоит из холмов, долин, складок и оврагов в пространстве высокой размерности. Сеть может попасть в локальный минимум (неглубокую долину), когда рядом имеется гораздо более глубокий минимум. В точке локального минимума все направления ведут вверх, и сеть неспособна из него выбраться. Основную трудность при обучении нейронных сетей составляют как раз методы выхода из локальных минимумов: каждый раз выходя из локального минимума снова ищется следующий локальный минимум тем же методом обратного распространения ошибки до тех пор, пока найти из него выход уже не удаётся.
Внимательный разбор доказательства сходимости [3] показывает, что коррекции весов предполагаются бесконечно малыми. Ясно, что это неосуществимо на практике, так как ведёт к бесконечному времени обучения. Размер шага должен браться конечным. Если размер шага фиксирован и очень мал, то сходимость слишком медленная, если же он фиксирован и слишком велик, то может возникнуть паралич или постоянная неустойчивость. Эффективно увеличивать шаг до тех пор, пока не прекратится улучшение оценки в данном направлении антиградиента и уменьшать, если такого улучшения не происходит. П. Д. Вассерман [7] описал адаптивный алгоритм выбора шага, автоматически корректирующий размер шага в процессе обучения. В книге А. Н. Горбаня [8] предложена разветвлённая технология оптимизации обучения.
It should also be noted the possibility of retraining the network, which is rather the result of an erroneous design of its topology. With too many neurons, the network property is lost to generalize information. The entire set of images provided for training will be learned by the network, but any other images, even very similar ones, may be classified incorrectly.

Comments
To leave a comment
Machine learning
Terms: Machine learning