Lecture
The microfone (from the Greek. Μικρός - small, φωνη - voice) is an electro-acoustic device that converts sound ripples in a *** ring of electric current, an input device. Serves as the primary link in the chain of the recording path or sound reinforcement. Microphones are used in many devices, such as telephones and tape recorders, in sound and video recordings, in radio and television, for radio communications, as well as for ultrasound monitoring and measurement.
At first, Edison's coal microphone was the most widely used. Heinrich Makhalsky also independently stated the invention in 1878 and Paul Golubitsky in 1883. The carbon microphone is still used in analog telephony devices. Its action is based on the change in resistance between the grains of coal powder when the pressure changes on their totality.
The condenser microphone was invented by Bell Labs engineer Edward Christopher Wente in 1916. In it, the sound acts on a thin metal membrane, changing the distance between the membrane and the metal body. Thus, the capacitor formed by the membrane and housing changes the capacitance. If a constant voltage is applied to the plates, a change in the capacitance will induce a current through the capacitor, thereby forming an electrical signal in the external circuit.
Dynamic microphones, which differ from coal ones by much better linearity of characteristics and good frequency properties, and from condenser ones, more acceptable electrical properties, have become more popular. The first dynamic microphone was invented in 1924 by German scientists Erlach ( Gerwin Erlach ) and Schottky tape-type electrodynamic microphone. They arranged a corrugated ribbon of very thin (about 2 microns) aluminum foil in a magnetic field. Such microphones are still used in studio sound recordings due to extremely wide frequency characteristics, but their sensitivity is low, the output impedance is very small (fractions of an ohm), which significantly complicates the design of amplifiers. In addition, sufficient sensitivity is achievable only with a significant area of the ribbon (and hence the size of the magnet), as a result, such microphones are larger and have a mass compared to all other types.
A piezoelectric microphone, designed by Soviet scientists S. N. Rzhevkin and A. I. Yakovlev in 1925, has, as a sound pressure sensor, a plate of a substance with piezoelectric properties. Working as a pressure sensor made it possible to create the first hydrophones and record ultra-low-frequency sounds characteristic of marine life.
In 1931, American engineers Wente and Teres ( Albert L. Thuras ) invented a dynamic microphone with a coil glued to a thin polystyrene or foil membrane. Unlike tape, it had a significantly higher output resistance (tens ohms and hundreds of kilo-ohms), could be made in smaller sizes and is reversible. Improving the characteristics of these microphones, combined with the improvement of sound amplification and recording equipment, made it possible for the recording industry to develop not only in studio conditions. The creation of small in size (even despite the mass of the permanent magnet necessary for the operation of the microphone), as well as extremely sensitive and narrowly focused dynamic microphones to a noticeable degree changed the idea of privacy and gave rise to a number of changes in legislation (in particular, on the use of listening devices).
At the same time, developed electromagnetic microphones, in contrast to electrodynamic microphones, have a permanent magnet fixed to the membrane and a fixed coil. Due to the absence of stringent requirements for the coil mass (typical of dynamic microphones), such microphones were made high-resistance, and sometimes they also had multi-tap coils, which made them more versatile. Such microphones, along with piezoelectric, made it possible to create effective hearing aids, as well as laryngophones.
The electret microphone, invented by the Japanese scientist Yoguchi in the early 1920s, is close to a condenser one by the principle of operation and design, but a plate from an electret acts as a fixed plate of a capacitor and a source of constant voltage. For a long time, such microphones were relatively expensive, and their very high output impedance (like condenser ones, units of mega-ohm and higher) made it necessary to use only lamp circuits. The creation of field-effect transistors led to the emergence of extremely efficient, miniature and light electret microphones, combined with a preamplifier assembled in the same case on a field-effect transistor.
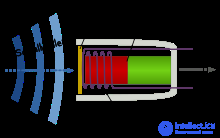
The principle of operation of the microphone with a moving coil
The principle of operation of a microphone is that the pressure of sound levels of air, water or solid matter acts on the thin membrane of the microphone. In turn, the sleeves of a *** membrane excite electric sleeves of a ***; Depending on the type of microphone, the phenomenon of electromagnetic induction, a change in capacitor capacitance, or the piezoelectric effect are used.
The properties of the acoustic-mechanical system strongly depend on whether the sound pressure acts on one side of the diaphragm (pressure microphone) or on both sides, and in the second case on whether this effect is symmetrical (pressure gradient microphone) or on one side of the diaphragm The number of *** that directly excites it, and the second - the ones that passed through any mechanical or acoustic impedance or time delay system (asymmetric pressure gradient microphone).
A large influence on the characteristics of the microphone has its mechano-electric part.
Comparative characteristics of the main types of microphones (outdated data from the "TSB" 1967):
| Microphone type | Range of perceived frequencies, Hz | Frequency response irregularity, dB | Axial sensitivity at a frequency of 1000 Hz, mV / Pa |
|---|---|---|---|
| Carbonic | 300-3 400 | 20 | 1,000 |
| Electrodynamic coil type | 100-10 000 (1 class)
30–15,000 (upper class) |
12 | 0.5
~ 1.0 |
| Electrodynamic belt type | 50-10 000 (1 class)
70–15,000 (upper class) |
ten | one
1.5 |
| Condenser | 30–15,000 | five | five |
| Piezoelectric | 100-5 000 | 15 | 50 |
| Electromagnetic | 300-5 000 | 20 | five |
Microphones of any type are evaluated by the following characteristics:
Microphone sensitivity is determined by the ratio of the voltage at the microphone output to the sound pressure P 0 , as a rule, in a free sound field [1] , that is, in the absence of the influence of reflective surfaces [2] . When a sinusoidal sound wave propagates in the direction of the working axis of the microphone, this direction is called the axial sensitivity:
M 0 = U/P 0 (мВ/Па).
The working axis of the microphone is the direction of its primary use and usually coincides with the axis of symmetry of the microphone. If the microphone design does not have an axis of symmetry, then the direction of the working axis is indicated in the technical specifications. The sensitivity of modern microphones ranges from 1–2 (dynamic microphones) to 10–15 (condenser microphones) mV / Pa. The higher the value, the higher the sensitivity of the microphone.
Thus, a microphone with a sensitivity of –75 dB is less sensitive than –54 dB, and with a designation of 2 mV / Pa, less sensitive than 20 mV / Pa. For orientation: −54 dB is the same as 2.0 mV / Pa. It should also be noted that if the microphone has less sensitivity, this does not mean that it is worse.
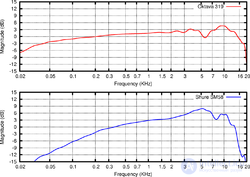
ChHCH of Oktava MK-319 and Shure SM58 microphones
The frequency response sensitivity (HHC) is the dependence of the axial sensitivity of the microphone on the frequency of sound coils *** in the free field. Non-uniformity of HHC, as a rule, is measured in decibels as twenty logarithms (base 10) of the ratio of the sensitivity of a microphone at a certain frequency to the sensitivity at a reference frequency (mostly 1 kHz).
The influence of the sound field of a microphone is estimated by the acoustic characteristic, which is determined by the ratio of the force acting on the diaphragm of the microphone and the sound pressure in the free sound field: A = F / P, but because the sensitivity of the microphone M = U / P can be represented as U / P = U / F • F / P and express in A. Then we get: M = A • U / F. The ratio of the voltage at the output of the microphone to the force acting on the diaphragm U / F characterizes the microphone as an electromechanical transducer. The acoustic characteristic determines the directivity pattern of the microphone. The type of acoustic characteristics, and hence the directivity characteristics, distinguish three types of microphones as sound receivers: pressure receivers; pressure gradient; combined.
| pressure receivers | |
 |
Undirected |
| pressure gradient receivers | |
 |
Bidirectional "Eight" |
| combined | |
 |
Cardioid |
 |
Hypercardioid |
The directionality characteristic is the dependence of the sensitivity of the microphone on the direction of the sound wave incidence relative to the axis of the microphone. It is determined by the ratio of the sensitivity of Mα when a sound wave falls at an angle α relative to the acoustic axis of the microphone to its axial sensitivity:
φ = M α / M 0
Microphone directivity means its possible location relative to sound sources. If the sensitivity does not depend on the angle of incidence of the sound wave, that is, φ = 1, then the microphone is called non-directional, and sound sources can be placed around it. And if the sensitivity depends on the angle, then the sound sources should be located in a spatial angle within which the sensitivity of the microphone differs little from the axial sensitivity.
Non-directional microphones
In omnidirectional microphones - pressure receivers, the force acting on the diaphragm is determined by the sound pressure at the surface of the diaphragm. The sound field can act only on one side of the diaphragm. The second side is structurally protected. If the size of the microphone is small compared to the length of the sound wave, the microphone does not change the sound field. If the dimensions are commensurate with the wavelength, then due to the diffraction of sound waves, the microphone becomes directional. At frequencies of 5,000 Hz and below, such microphones are non-directional. The advantage of omnidirectional microphones is the simplicity of the design, the calculation of the primer and the stability of the characteristics over time. Omnidirectional caps are often used as part of measuring microphones, and in everyday life can be used to record the conversation of people sitting at a round table.
Two way microphones
In microphones, receivers of a pressure gradient, the force acting on a moving microphone system is determined by the difference in sound pressure on the two sides of the diaphragm. That is, the sound field acts on two sides of the diaphragm. Characteristic orientation has the appearance of eight.
Bilateral microphones are convenient, for example, to record a conversation between two interlocutors sitting opposite each other.
One-way microphones
One-sided directionality is achieved in microphones of the combined type. Their radiation patterns are close in form to the cardioid, therefore they are often called cardioid. Modifications to microphones that have an even smaller directivity than cardioids are called supercardioid and hypercardioid, but these varieties, unlike a cardioid microphone, are also sensitive to signals from the opposite side.
These microphones have certain advantages in operation: the sound source is located on one side of the microphone within a fairly wide spatial angle, and the sound does not propagate beyond its limits.
The level of intrinsic noise of the microphone N ш is determined by the ratio of the effective voltage at the microphone output in the absence of a sound field U sh to the voltage U 1 in the presence of a sound field with an effective pressure of 0.1 N / m²:
N W = 20 lg U W / U 1 dB.
The voltage U sh is mainly due to thermal noise in the components of the microphone circuit.
For microphones, there are different types of protection: polyurethane covers, pop filters and sound attenuating boxes.

Microphone with protection removed.

Pop filter.

"Dead cat" and "dead kitten." A dead cat closes the stereo microphone for a DSLR camera. Names differ due to different sizes.

Comments
To leave a comment
Acoustoelectronics and acoustooptics
Terms: Acoustoelectronics and acoustooptics